这是上一期提到的感知器公式:
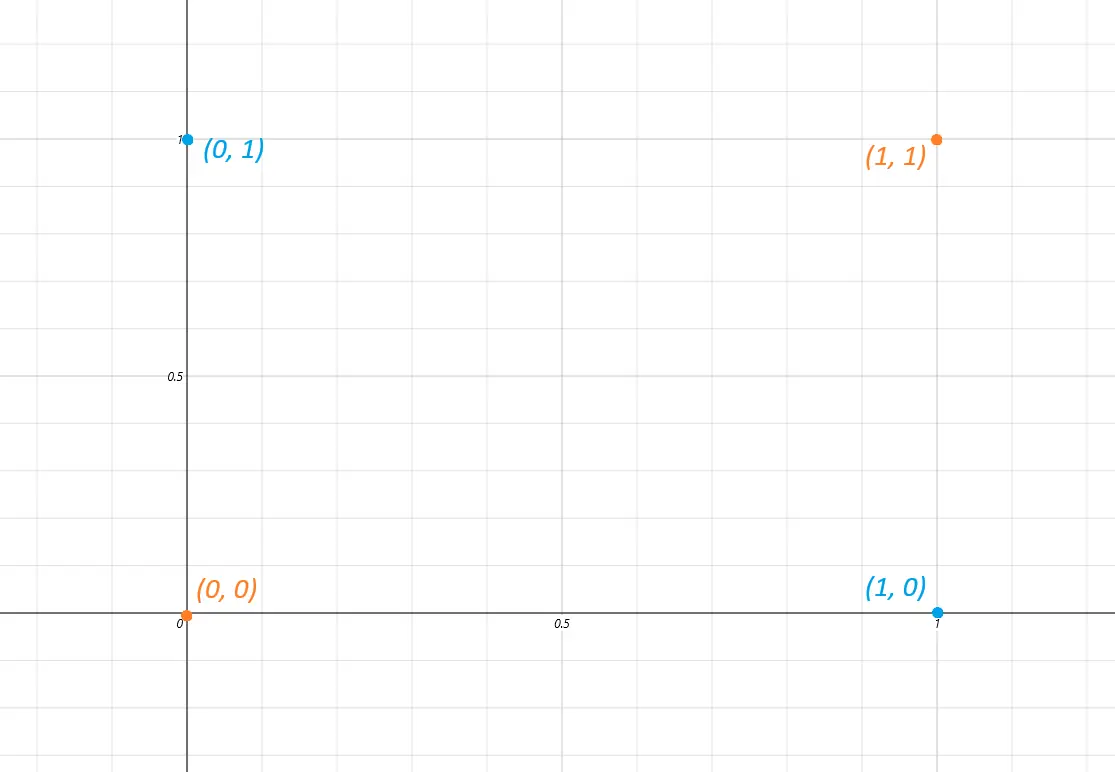
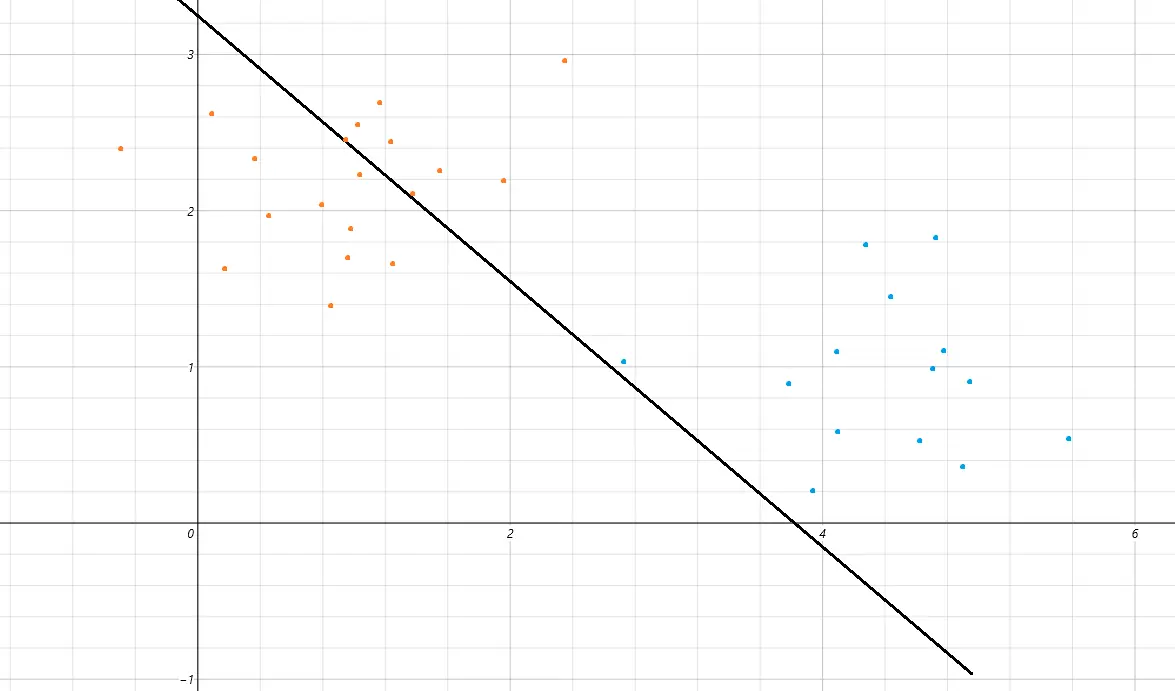
f(x)=W1X1+W2X2+b它本质上是一条线,它的目标是分开这分布在二维平面上的点(橙色点的目标值为 1, 蓝色点的为 0):
而这条线由 W1、W2 和 b 共同影响。
所以,问题的关键其实是要知道 Wi 和 b 要变大还是变小,变大变小多少?
自动调整
直接告诉你答案吧:
Wi(t)=Wi(t−1)+(Y−y)∗xib(t)=b(t−1)+(Y−y)Y 是目标值,y 是输出值。
当 Y 和 y 一致,分类正确,(Y−y)=0,不调整。
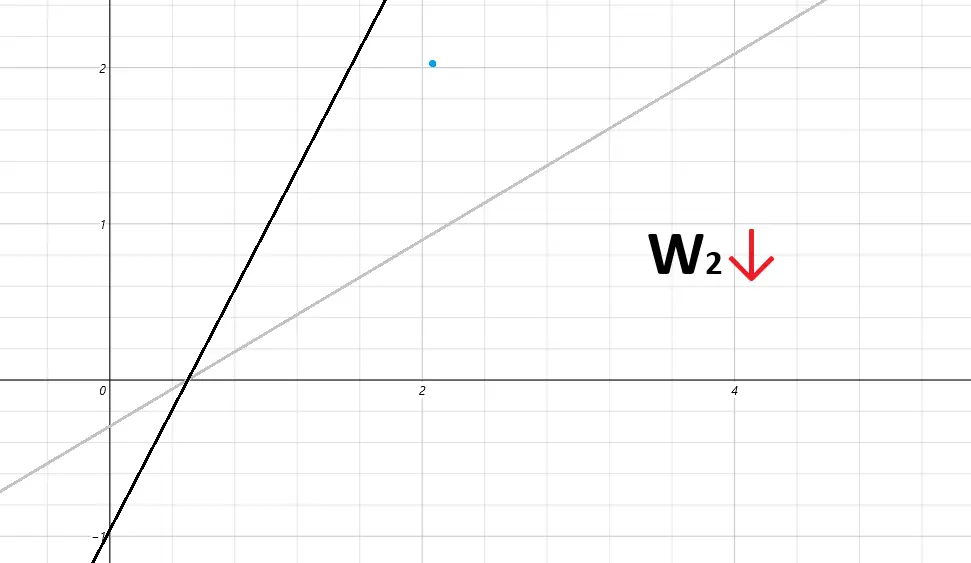
当蓝色的点在线上方时,分类错误,(Y−y)=−1,说明 Wi 或 b 太大:
当橙色的点在线下方时,分类错误,(Y−y)=1,说明 Wi 或 b 太小:
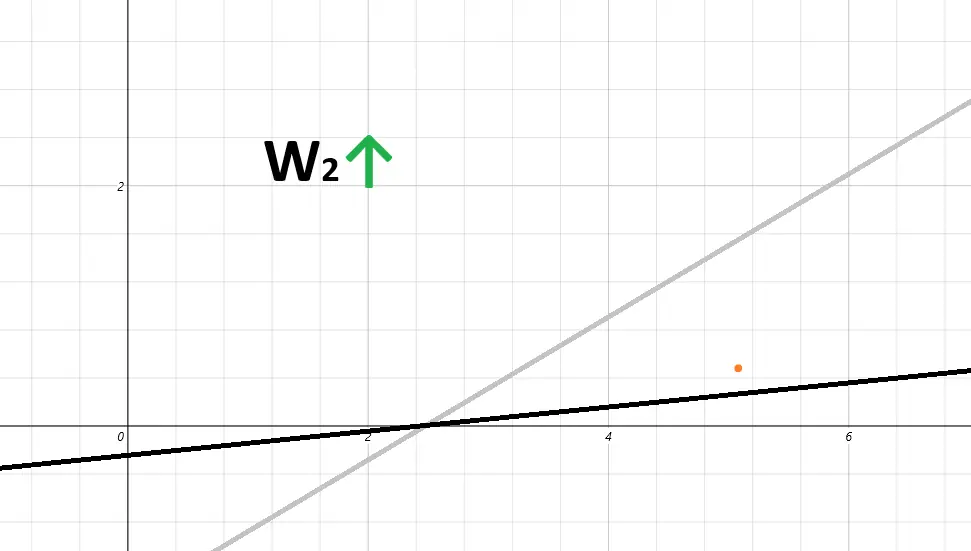
乘以 xi 是因为随着 xi 变大,Wi 调整得也应该更大:
通常,它们还会再被乘个 r,这会在今后的内容里展开。
Wi(t)=Wi(t−1)+(Y−y)∗xi∗rb(t)=b(t−1)+(Y−y)∗r结尾
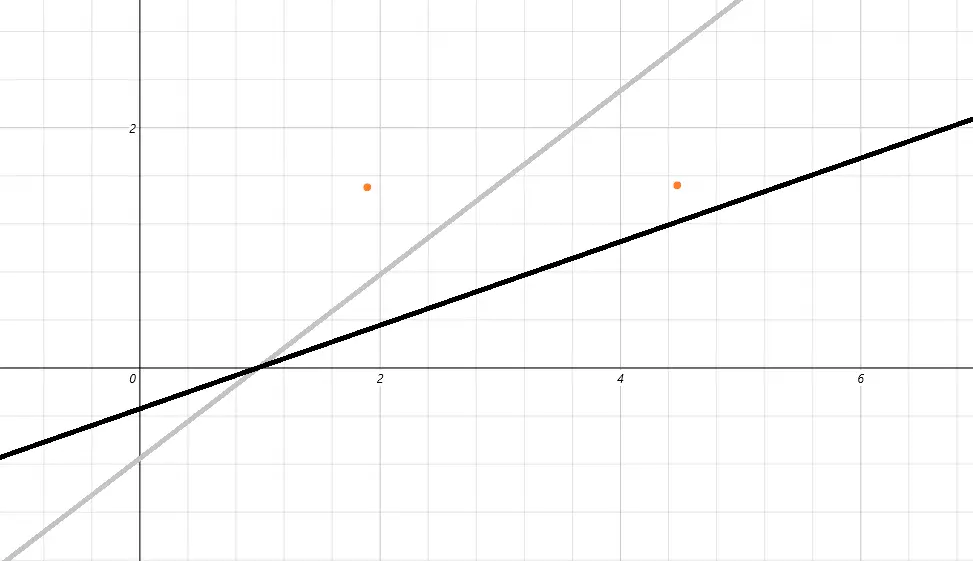
通过不断调整 Wi 和 b 值,机器总能将点分成两类。
试试看,这个能不能被分开: